Категория: ЧПУ станки и Роботы |
Комментарии: 4
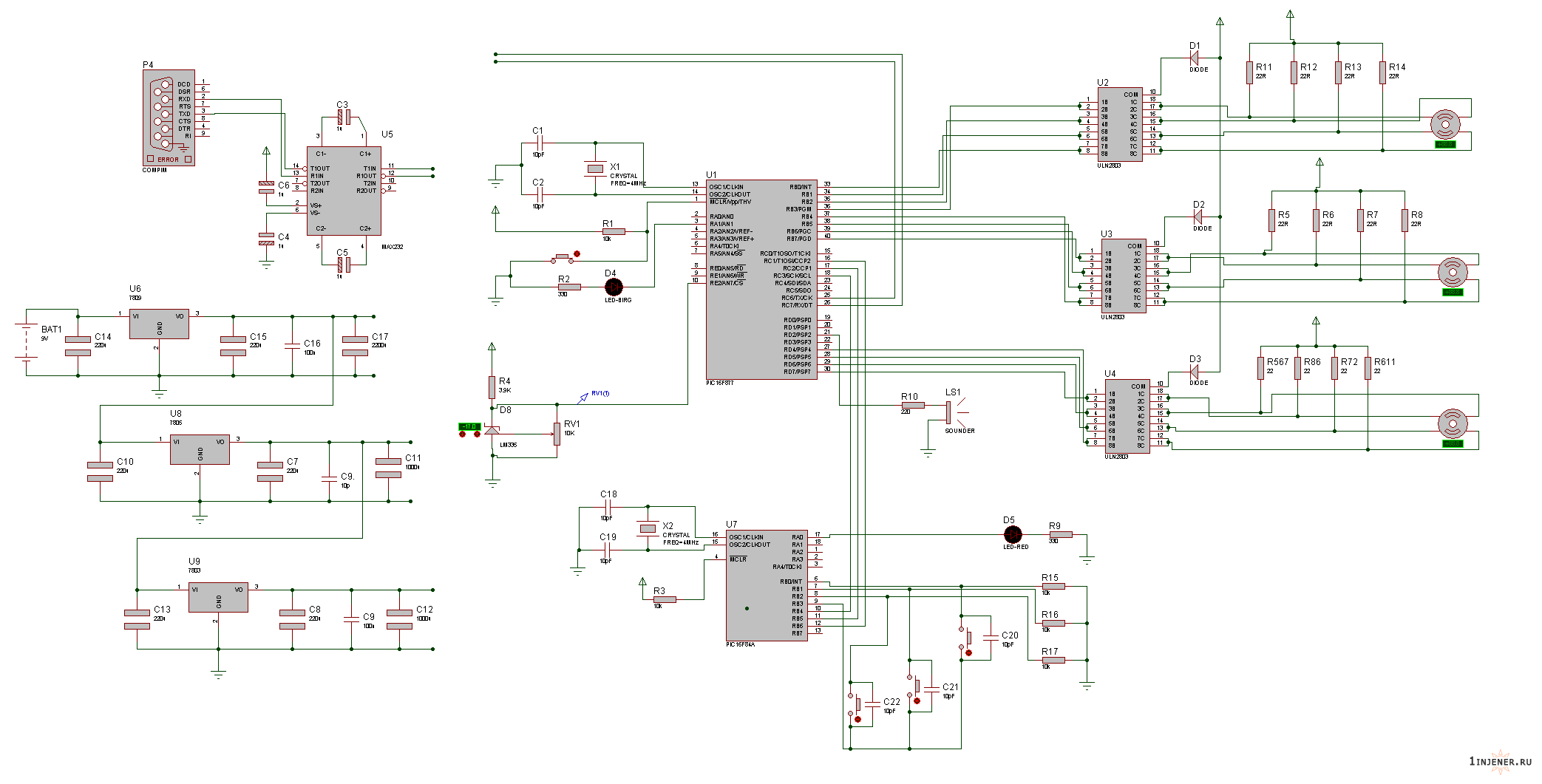
#Чпу станок для дома #2 - Схема своими руками.
Сразу к делу и угрозам. Схема станка собрана на доступных элементах, с наименьшей ценой, с наибольшей доступностью, в минимум средств и практическое их отсутствие.
В статье не расчитаны токи, напряжения, резонансы, кпд, теплопроводности, но описаны риски при использовании данной схемы. И это может быть опасно для нервов и вашего времени.
Далее несколько фото и описание схемы с устройством станка.
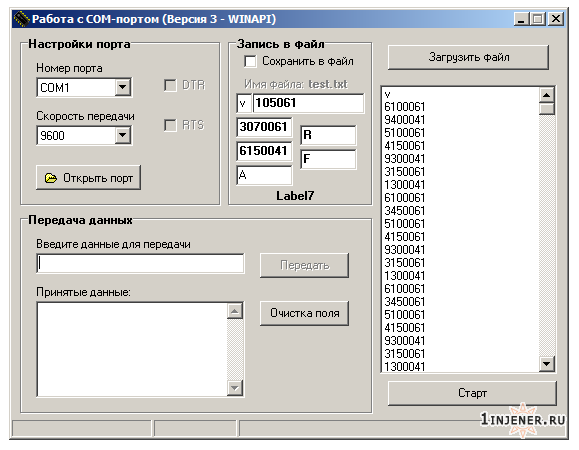
Программа для упраления ЧПУ станком для дома была написана на языке C++ в Borland Builder. Используя один из ОпенСоурс исходников для работы с COM портом дописаны функции общения со станком (Программой на предыдущей странице)
Программа проста в использовании. Открывается необходимый COM порт к которому подключен переходник USB-COM (Он определяется как COM).
Напомним что первый символ команды вызывает нужную функцию в прошивке микроконтроллера, при управлении нужным мотором.
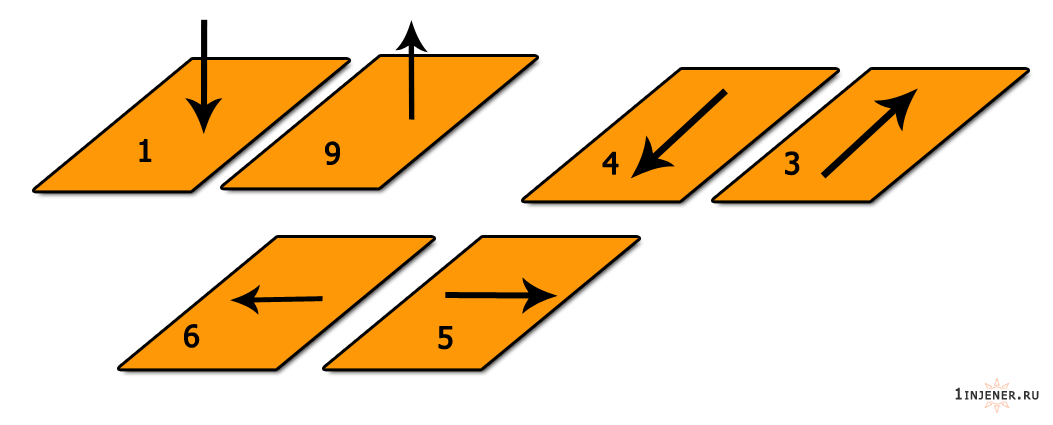
Станок имеет 3 вида управления:
Ручной - В программе вносятся настройки в поля ввода и управляя клавишами "стрелок" на клавиатуре происходит прямое управление перемещением каретки.
Автоматизированный - команды для станка вводятся из файла, и станок в автоматическом режиме выполняет последовательно все команды пока не достигнет конца команд.
Совсем ручной - предназначен для отладки, вручную вводится каждая команда.
В итоге получилось довольно хорошо, эстетично, не учитывая что схема была собрана на макетных платах, но стабильно.
Другие статьи по разделу:
В статье не расчитаны токи, напряжения, резонансы, кпд, теплопроводности, но описаны риски при использовании данной схемы. И это может быть опасно для нервов и вашего времени.
Далее несколько фото и описание схемы с устройством станка.
Программа для упраления ЧПУ станком для дома была написана на языке C++ в Borland Builder. Используя один из ОпенСоурс исходников для работы с COM портом дописаны функции общения со станком (Программой на предыдущей странице)
Программа проста в использовании. Открывается необходимый COM порт к которому подключен переходник USB-COM (Он определяется как COM).
Напомним что первый символ команды вызывает нужную функцию в прошивке микроконтроллера, при управлении нужным мотором.
Станок имеет 3 вида управления:
Ручной - В программе вносятся настройки в поля ввода и управляя клавишами "стрелок" на клавиатуре происходит прямое управление перемещением каретки.
Автоматизированный - команды для станка вводятся из файла, и станок в автоматическом режиме выполняет последовательно все команды пока не достигнет конца команд.
Совсем ручной - предназначен для отладки, вручную вводится каждая команда.
В итоге получилось довольно хорошо, эстетично, не учитывая что схема была собрана на макетных платах, но стабильно.

Другие статьи по разделу:
 Телеуправляемый робот Trackbot Surveillance
Телеуправляемый робот Trackbot Surveillance
Робот-газонокосилка Honda Miimo
Детский робот ReCon
Робот ROMO на базе смартфона
#1 Марат
| Здравствуйте, кто ни будь делал это устройство? сможете скинуть hex файл, а то в C++ borland не очень хорошо разбираюсь |
#2 Инженер
| Я делал. Какой именно файл необходим? |
#3 Марат
| Инженер, мне прошивки нужны для этого устройства |
#4 Марат
| Кто ни будь сможет помощь мне с этой прошивкой) напишите если не трудно) мне нужна обе эти прошивкИ, |
Комментарии
Ответ: Марат
Кто ни будь сможет помощь мне с этой прошивкой) на…
Ответ: Марат
Инженер, мне прошивки нужны для этого устройства
Ответ: Марат
Здравствуйте, кто ни будь делал это устройство? см…

Ответ: Дмитрий
Доброго времени суток. Огромный респект за мануал,…


Новые изобретения инженеров и техников, дизайнеров и обычных людей, все то что может изменить наш мир к лучшему. Новая техника и оружие, спасателей и спецназа. Гаджеты и девайсы, устройства для отдыха и работы. Советы для экономии семейного состояния. Все гениальные изобретения в простом формате! Ведь «Все — Просто!»
Copyright © 2013–. Политика конфиденциальности
Автоматизация и проектирование — 1injener.ru
Copyright © 2013–. Политика конфиденциальности
Автоматизация и проектирование — 1injener.ru